

論文紹介リスト:※代表的な論文を記載しています
論文紹介を見る
BMIと自動運転による安全な操縦システム
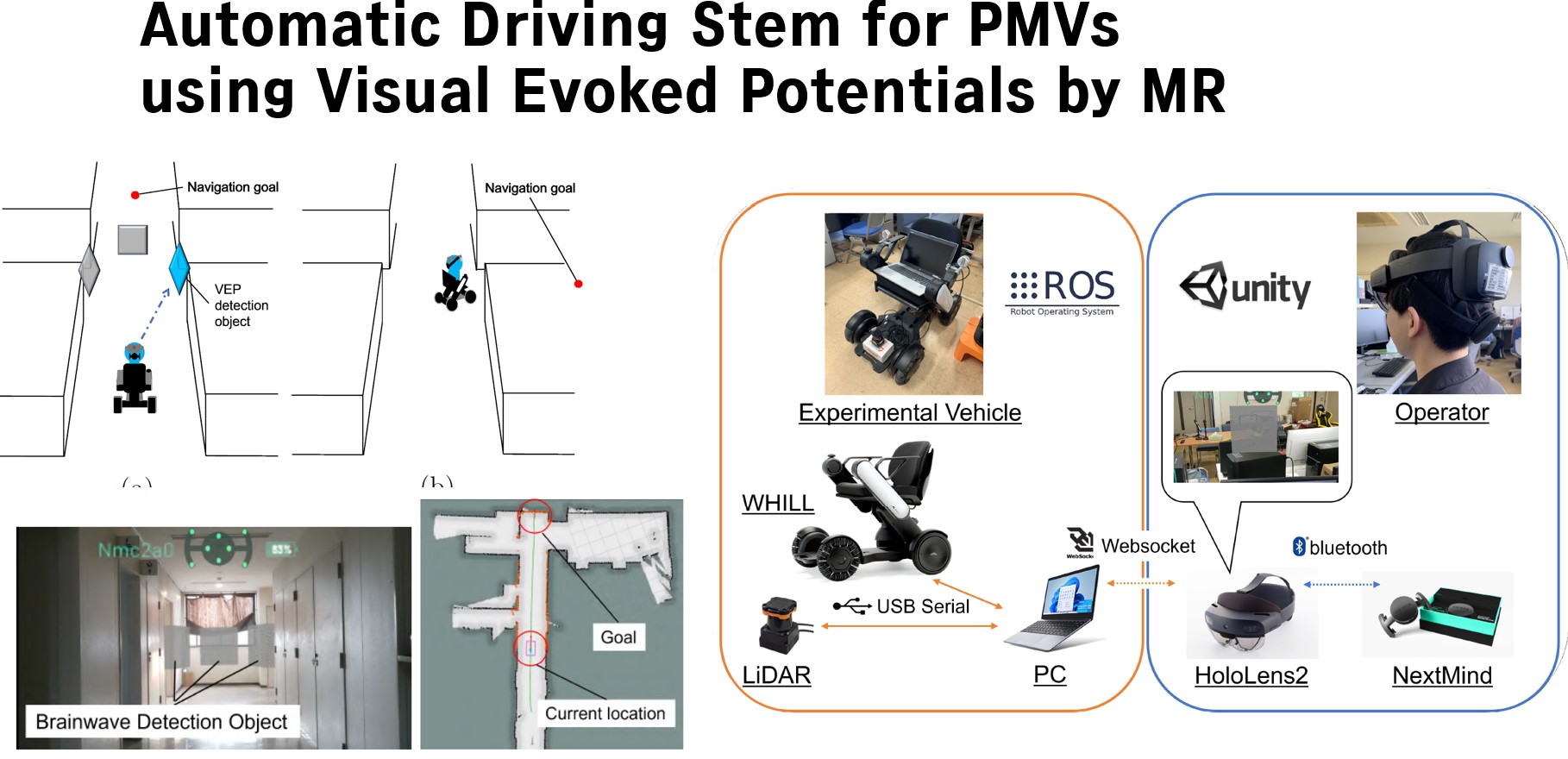
特定の周波数の視覚刺激によって発生する定常状態視覚誘発電位(SSVEP)を用いた小型かつ安価なBCI が開発されている. 本研究では,VEP検出を使った安全な逐次型自動運転システムの構築と,そのVEP 検出の高速検出手法を提案する.
研究業績(抜粋)
- 奥園康太,森千紘,松永信智, 自動運転アルゴリズムを利用した福祉車両のセーフマニュアル制御の提案, 計測自動制御学会SICE九州支部, pp.65-68, 2022
- 奥園康太,森千紘,松永信智,Mixed Reality を用いた視覚誘発電位によるパーソナルビークルの操縦意図検出システムの実験検証,2023年度 電気・情報関係学会九州支部連合大会,09-1P-05,pp.172-173,2023
- 奥園康太,森千紘,松永信智,MRによる視覚誘発電位を用いたパーソナルモビリティビークルの自動運転システムの評価, 計測自動制御学会九州支部, 102A2, pp.15-18, 2023
歩行者群追従制御
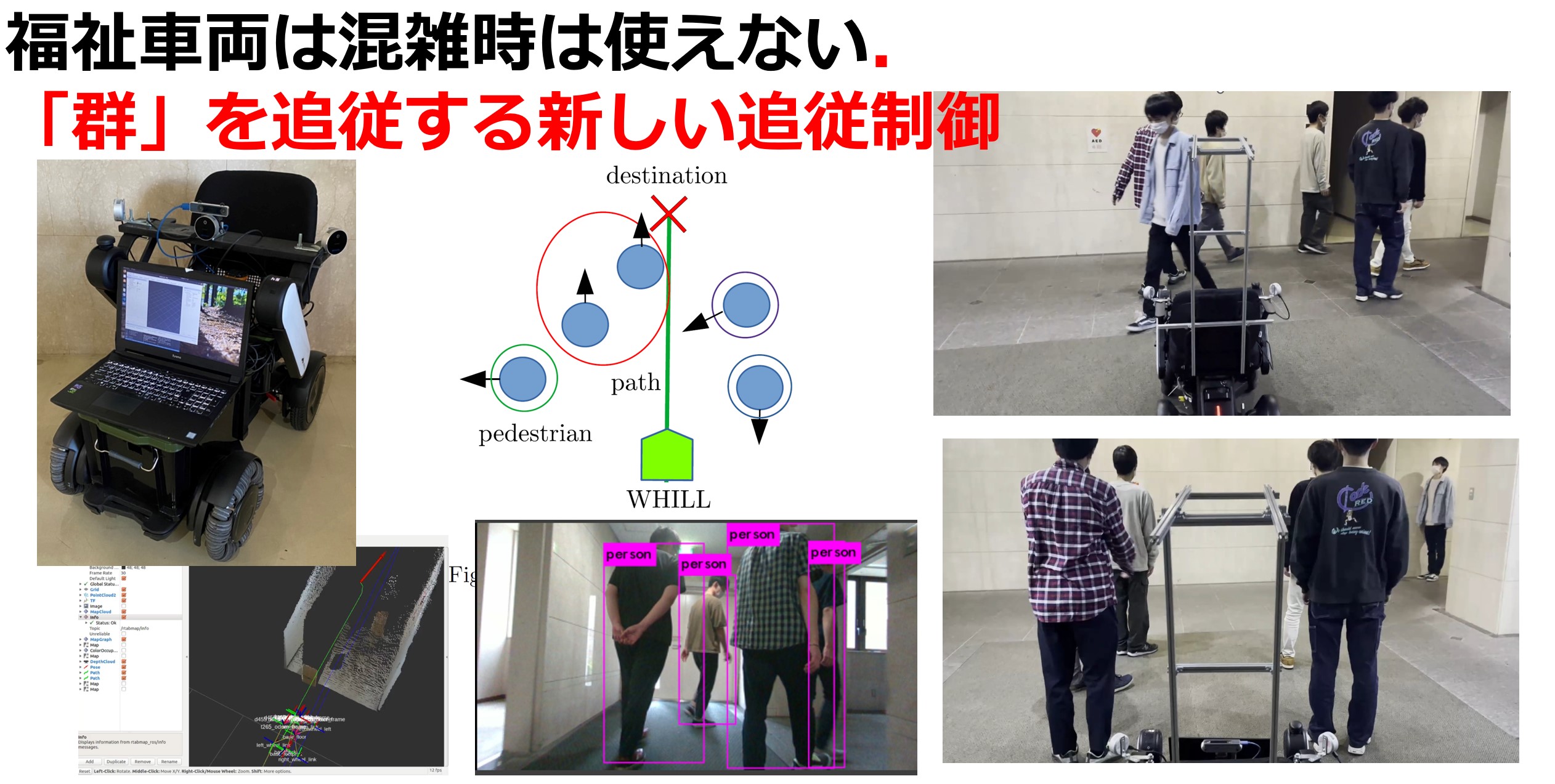
人混みでのナビゲーションの方法の一つとして,歩行者追従を利用した椅子のナビゲーションがある.しかし,人混みでは必ずしも目的とする方向に向かい続けるとは限らない.これを防ぐ手法として,歩行者の集団を追従する方法がある.集団を追従するためには,目的点方向に向かう歩行者のクラスタを選択して追従する.しかし,クラスタから計算された福祉車両の目標位置に外れ値が生じることになる.これに対して,外れ値に対処するためにMCV(median of candidate vectors) オブザーバを使った歩行者群追従の手法を提案している.
研究業績(抜粋)
- Nobutomo Matsunaga, Ikuo Yamamoto, Hiroshi Okajima, Navigation System for Personal Mobility Vehicles Following a Cluster of Pedestrians in a Corridor Using Median of Candidate Vectors Observer,JRM$2003Vol.35 No.6$2003pp. 1562-1572, doi: 10.20965/jrm.2023.p1562
- Ikuo Yamamoto1, Kouich Nakamura1, Nobutomo Matsunaga and Hiroshi Okajima,Crowd Tracking of Electric Wheelchair using RGB-D Camera with Median of Candidate Vectors Observer, Proceedings of the SICE Annual Conference 2022, pp.174-178,2022
- iroshi Okajima, Yasuaki Kaneda, Nobutomo Matsunaga,State estimation method using median of multiple candidates for observation signals including outliers, SICE Journal of Control, Measurement, and System Integration Volume 14, Issue 1, pp. pp.257-267,2021
- 岡島寛, 金田泰昌, 田村友規, 松永信智, メディアンを用いた外れ値やデータ欠落にロバストな状態推定オブザーバ, 計測自動制御学会論文集, 55(4),2019
マルチロボットによる搬送
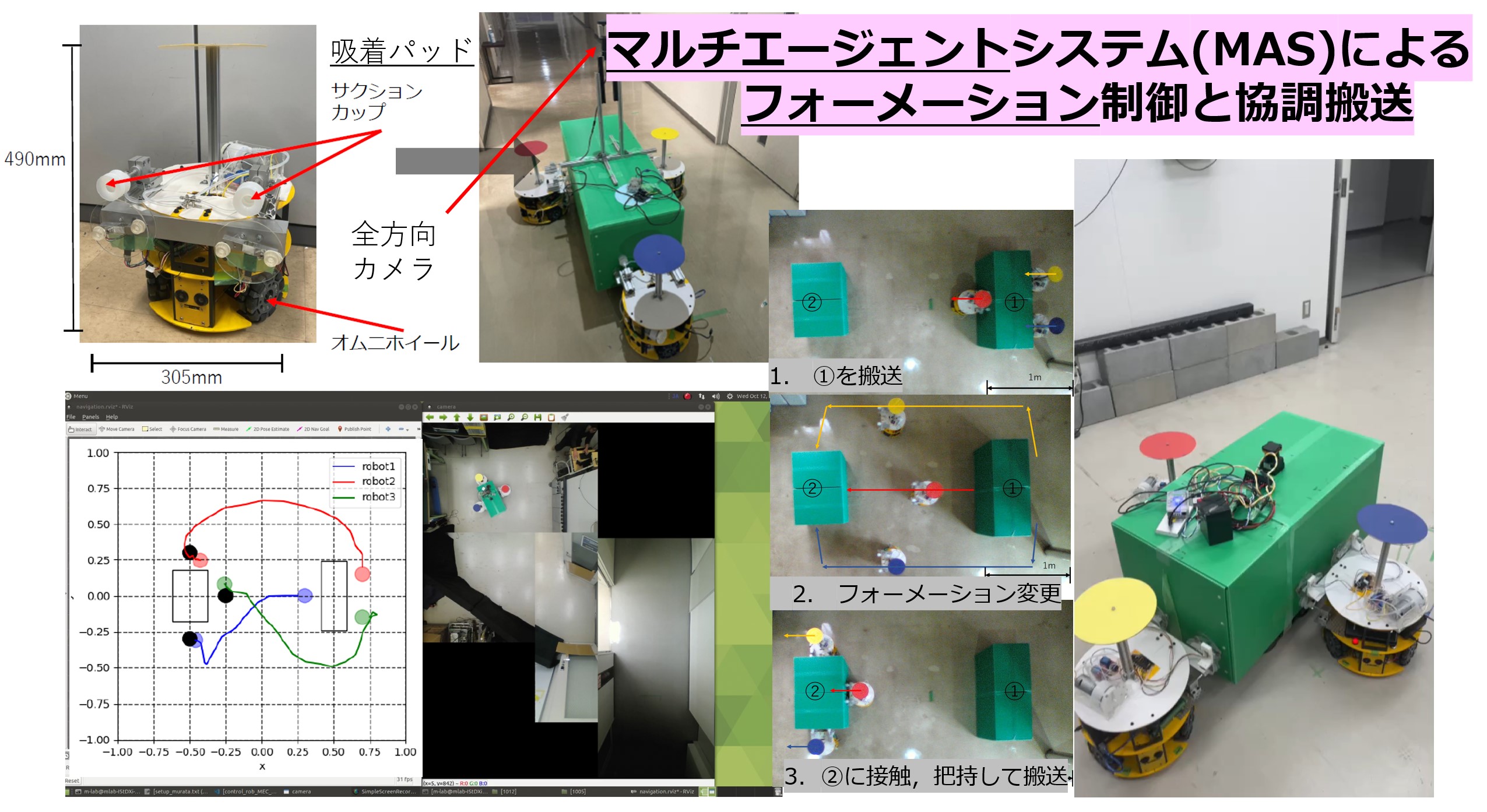
近年,複数の自律移動ロボットを用いた大型物体の協調搬送の実用化が試みられている.複数のロボットはタスクに応じてフォーメーションを形成し,協調して搬送物を動かす.この際,各ロボットと搬送物との把持位置に誤差があると搬送物の走行経路にも誤差が発生する恐れがある.本研究では,モデル誤差抑制補償器により搬送物と各ロボットの把持位置の誤差によって生じる搬送物の走行誤差を抑制する協調搬送システムを研究している.
研究業績(抜粋)
- Nobutomo Matsunaga, Kazuhi Murata,and Hiroshi Okajima, Robust Cooperative Transport System with Model Error Compensator Using Multiple Robots with Suction Cups, JRM$2003Vol.35 No.6$2003pp. 1583-1592,doi: 10.20965/jrm.2023.p1583
- Kazuhi Murata, Kenta Miyazaki, Nobutomo Matsunaga,Experiment of Cooperative Transportation using Multi-Robots with Suction-cups by Multi-agent Deep Deterministic Policy Gradient,13th Asian Control Conference (ASCC) pp.1120-1123,2022
- Almira Budiyanto, Keisuke Azetsu, Kenta Miyazaki and Nobutomo Matsunaga,On Fast Learning of Cooperative Transport by Multi-robots using DeepDyna-Q Proceedings of the SICE Annual Conference 2022,pp.1058-1062,2022
- Kenta Miyazaki, Nobutomo Matsunaga and Kazuhi Murata,Formation path learning for cooperative transportation of multiple robots using MADDPG The 21st International Conference on Control, Automation and Systems (ICCAS 2021),2021
アシストロボットの研究
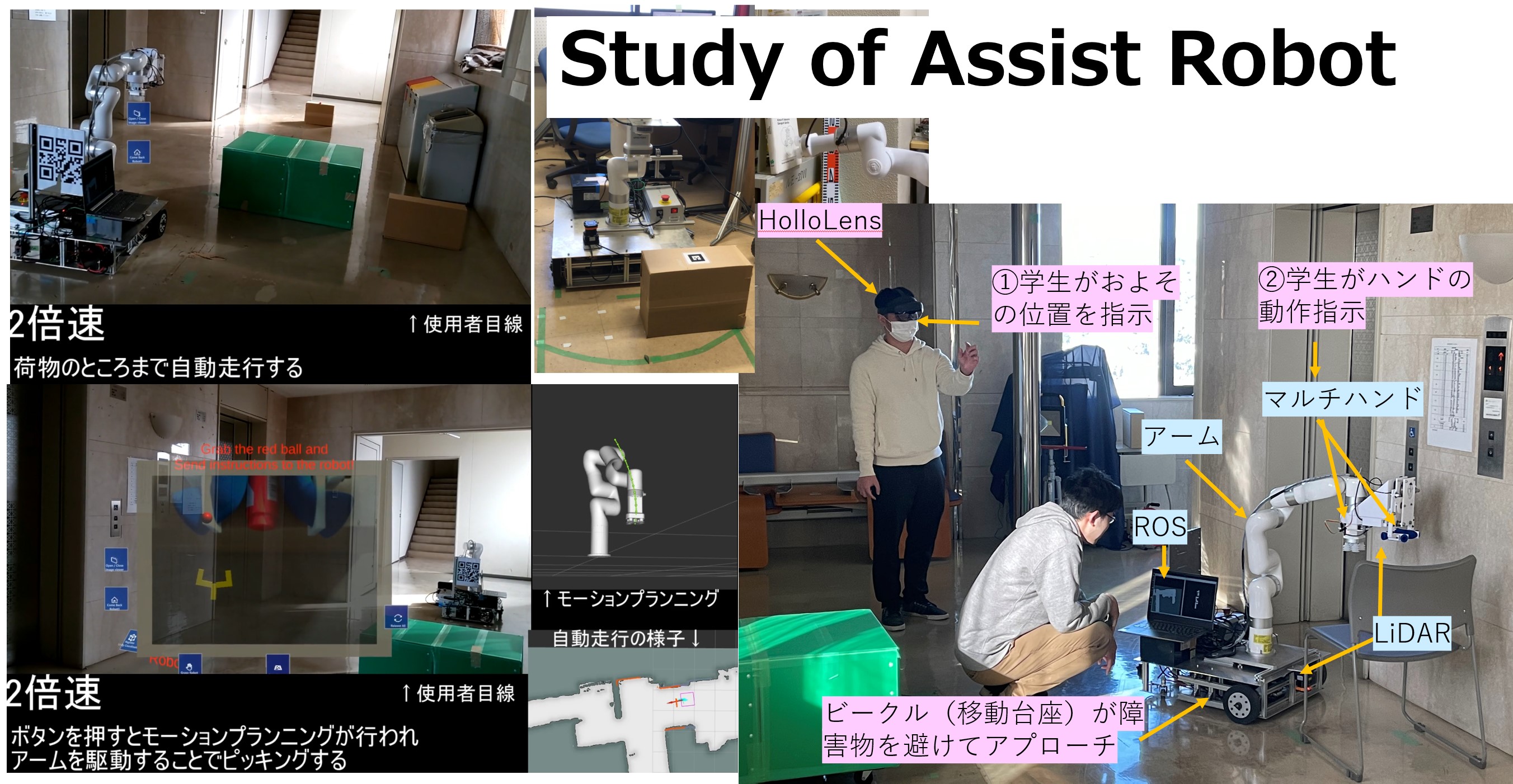
利用者はベッドに横たわったまま,表示されるカメラの映像を見ながら,操作スティックを使ってアシストロボットを操縦することで,床や棚にあるものを取ることができる.このシステムでは,利用者は常にロボットから送信される映像を見ながら遠隔操作で操作する必要があり,その操作には高度な技術が求められる.特に,ロボットアームの動きを遠隔で確認しながら物を拾う場合にも複雑な操作が必要であり,カメラ映像のみを使って物体を掴むのは困難な場合がある.本研究では,複数の把持機構を有する移動型アシストロボットをHMD を使ってカメラ視点,目視を切り替えて荷物を操作・把持する手法を研究する.
研究業績(抜粋)
- Naoki Miyamura, Nobutomo Matsunaga and Hiroshi Okajima,Development of an automatic picking system for assistive robots using MR The 21st International Conference on Control, Automation and Systems (ICCAS 2021),2021
トレーニングとセーフマニュアルコントロール
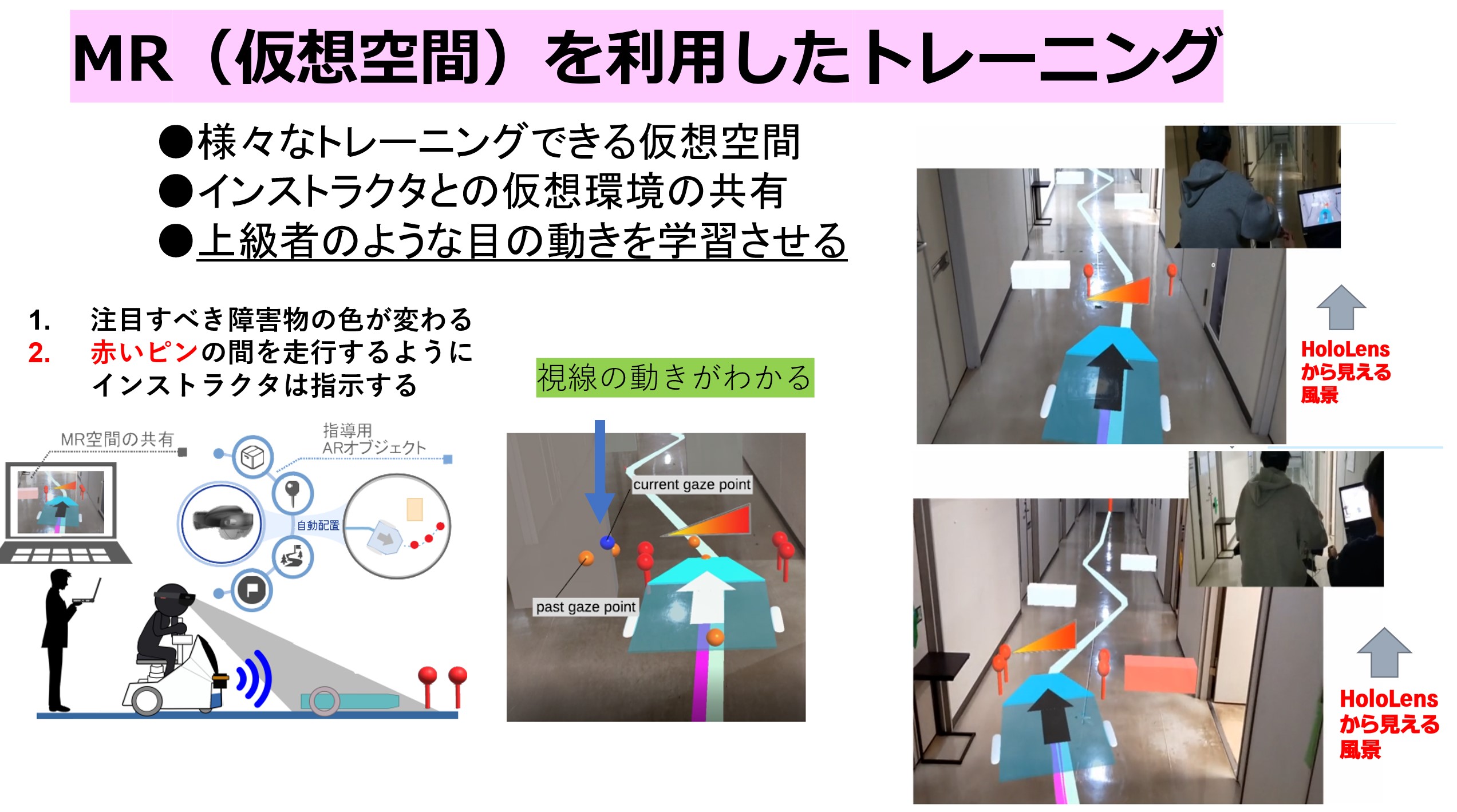
超高齢化社会ではAR やMR を使った装置が出現し便利になっていくと思われるが,その利用の際には福祉車両の操縦の上達に時間がかかることが障壁になると考える.福祉車両の操縦の上達は,利用者自身の運動能力に大きく依存する.操縦をより早く上達するには,操縦に習熟したインストラクタが適切なコーチング(指導) を行うことが重要である.MR などを利用する場合は,利用者が仮想車両のような仮想空間にある物(仮想オブジェクト) を利用して操縦のトレーニングを行うことになる.仮想オブジェクトを使うトレーニングは事前準備がほとんど必要ないため,利用者にとって利用しやすい.他方,仮想オブジェクトを使ったシステムは,インストラクタからは仮想車両の運転状態を視認できないため適切な指導が難しい.効果的なトレーニングを行うためには,利用者がインストラクタと仮想オブジェクトを利用する仮想空間を共有することができれば短時間での操縦の上達が期待できる.
研究業績(抜粋)
- 松永信智,中村怜央,武内雄大,岡島寛, MRを用いた福祉車両の操縦支援システムに対するNASA-TLX を用いた初心者の障害物回避操作の訓練回数ごとの習熟分析, 日本機械学会論文集,Vol.88,No.905,2022,2022
- Nobutomo Matsunaga ,Yudai Takeuchi and Hiroshi Okajima,Driver’s Gaze-point Analysis of Virtual Platoon Driving for Welfare Vehicle using Direct Eye Measurement Device with HMD The 12th Asian Control Conference 2019 pp.856-860,2019
- Kazuya Tanaka, Shunpei Fukumoto, Nobutomo Matsunaga and Hiroshi Okajima,Obstacle Avoidance ofWelfare Vehicle with Head Mounted Display using Spatial Mapping of Driving Environment, 2019 19th International Conference on Control, Automation and Systems (ICCAS 2019),FA1-1, PP.1222-1227 ,2019
- Shoichi Sakamoto, Nobutomo Matsunaga and Hiroshi Okajima,Hybrid Steering Model Estimated by Particle Swarm Optimization Based on Driver's Eye Tracking Information 18th International Conference on Control, Automation and Systems (ICCAS 2018),pp.375-380,2018
デジタルツインを利用した自動運転
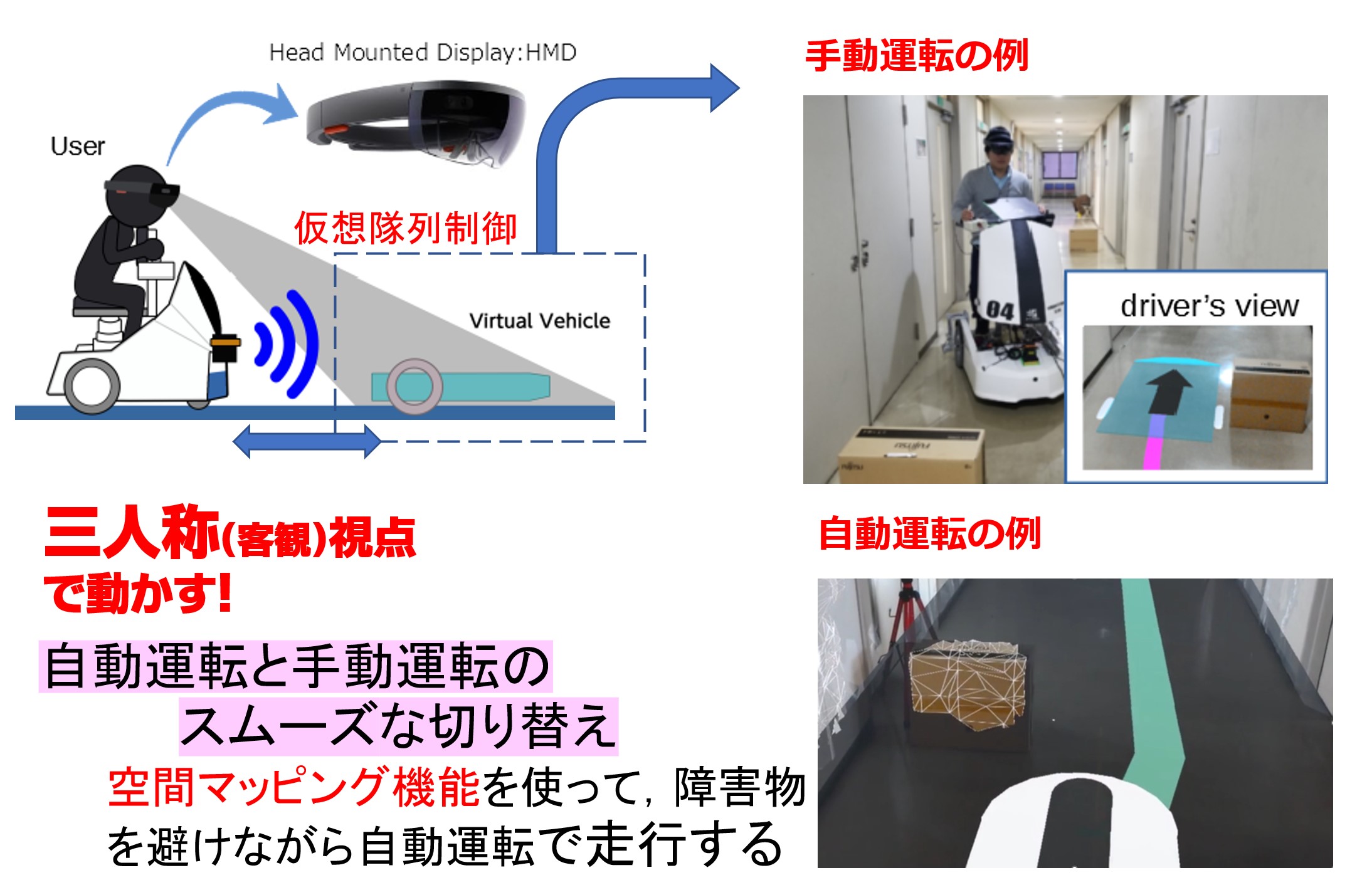
複雑な混合交通では完全な福祉車両の自動走行は難しいが,走行環境に応じて自動走行を手動操作に切り替えて利用できれば有用である.そこで,自動走行のシステム構成に注目し福祉車両の操縦支援と同様にHMD を使った自動走行システムを考える.手動操作では,HMD 上に客観視点で投影された仮想車両を見て操作するが,自動走行に切り替えるとHMD への表示がなく利用者は福祉車両がどのように走行するかわからない.利用者が操作しやすい客観視点での自動走行をHMD を使って構築できれば,操作方法を手動操作に容易に切り替えができ,HMDのMixed Reality(MR) の機能を用いて自動走行が実現できると考えた.本研究では,福祉車両の自動走行の一例として障害物回避走行に注目し,仮想車両と現実の車両の仮想隊列制御を使った自動運転システムを構築する.HMD を使って走行環境の空間マッピングを行い,仮想車両は開発プラットフォームUnityのナビゲーションシステムを利用して障害物回避を行う.
研究業績(抜粋)
- 松永信智, 武内雄大, 岡島寛, MRを用いた走行環境の空間マッピングによる福祉車両の障害物回避システムの一構成法,日本機械学会論文集,87 巻, 894 号,pp. 20-00033, 2021
- 松永信智,木村亮太,岡島寛,Mixed Reality を用いた仮想隊列走行制御による福祉用パーソナルビークルの操縦支援システム 日本機械学会論文集[DOI:10.1299/transjsme.18-00479],Vol. 85, No. 872 pp. 18-00479-18-00479,2019
- Yudai TAKEUCHI, Nobutomo Matsunaga and Hiroshi Okajima,Driving Instruction and Training of Welfare Vehicle controlled by Virtual Platoon Scheme using Sharing System of AR 2019 19th International Conference on Control, Automation and Systems (ICCAS 2019),FB1-4,pp.1438-1443,2019
- Nobutomo Matsunaga, Ryota Kimura, Haruya Ishiguro, Hiroshi Okajima, Driving Assistance of Welfare Vehicle with Virtual Platoon Control Method which has Collision Avoidance Function using Mixed Reality,IEEE International Conference on Systems,Man,and Cybernetics pp.1911-1916,2018
石垣の3次元モデリングと複合現実による作業支援(熊本城の復興支援 )

2016年4月に発生した熊本地震によって熊本城は大きな被害を受けたが,特に石垣は石材約3万個が崩落した。熊本地震では石垣や城の早急な復元が期待されているが,もし写真や表面のデータだけでなく石材全体の精密な3 次元形状データが得られれば,復元だけでなくそれを使った石垣の構造分析やシミュレーションなど様々な用途に利用できる。
復元の際には,城内の貯石場から現場まで移動する際にクレーンを使用する.その移動の合間が石材のアーカイブ化に利用できと考えられるが,石材を3次元データに落とす作業は現場にとって一番の問題点である。
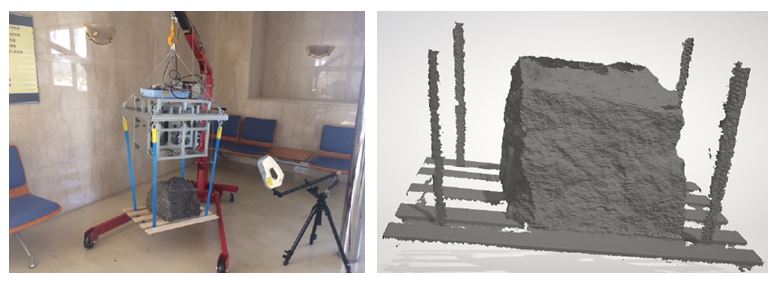
本研究では,高精度3D スキャナArtec EvaとCMG (Control Moment Gyro) デバイスを使って石材のデジタルデータの自動計測を行っている。
※これらの研究は熊本大学上瀧先生のJSTテーマ(画像処理による復興支援)と一部連携をしながら研究を進めています。下図,試作中のCMG及び石材の3Dデータ。

研究業績(抜粋)
- Nobutomo MATSUNAGA, Masaki KUWAHARA, Hiroshi OKAJIMA, Gou KOUTAKI, Analysis of Measuring Precision of 3D Model of Ishigaki Stone in Kumamoto Castle using Automatic CMG Crane System,Journal of Robotics and Mechatronics, Vol.34 No.3,2022
- 松永信智, Naufal Bayu FAUZAN, 岡島寛,上瀧剛, 熊本城の石垣石材の3D デジタルモデルの計測を目的としたモデル誤差抑制補償器によるCMGクレーンの制御 日本機械学会論文集,Vol.87,No.893 20-0017,2021
- Nobutomo Matsunaga, Naufal B. Fauza, Hiroshi Okajima1 and Gou Koutaki,Archive Method of Stone Wall in Kumamoto Castle Lifted by Small CMG Crane using
- Model Error Compensator The 12th Asian Control Conference 2019,pp.510-514,2019 Yusuke Take, Hiroshi Okajima, Nobutomo Matsunaga, Gou Koutaki, Restoration of Stone Wall ''ISHIGAKI'' Using Dropposition Information Proceedings of the SICE Annual Conference 2019,pp.976-981,2019
- Nobutomo Matsunaga, Naufal B. Fauza, Hiroshi Okajima1 and Gou Koutaki,Archive Method of Stone Wall in Kumamoto Castle Lifted by Small CMG Crane using Model Error Compensator The 12th Asian Control Conference 2019,pp.510-514,2019
- 岡島 寛,竹 祐亮,松永 信智,上瀧 剛,熊本城の石垣復旧のための複合情報に基づいた石垣マッチング,計測自動制御学会論文誌,No55,No.12,pp. 783-791,2019
- 小柳俊博,松永信智,岡島寛,上瀧剛,ジャイロ効果を利用した小型クレーンのモデル誤差抑制補償器による操作支援制御,ロボティクスメカトロニクス2018
- 小柳俊博,松永信智,岡島寛,上瀧剛,ジャイロ効果を利用した小型クレーンを使った石材のアーカイブ化の検討,計測自動制御学会SI部門大会,2018
拡張現実を用いた操縦支援システム
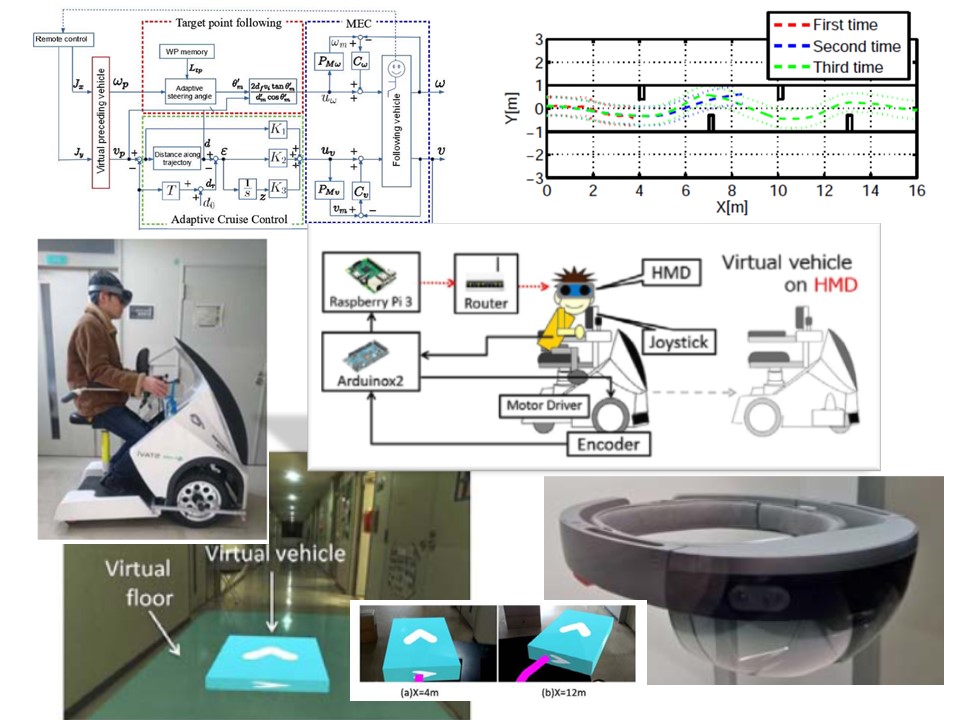
本研究では,拡張現実(Augmented Reality:AR)を使用して実車両の代わりに仮想の車両を前方に配置する「仮想隊列誘導制御」を使った新たな操縦法を研究する。認知能力と運転能力 の有効な改善手法は,第三者視点での操縦である。第三者視点での操縦は,搭乗車両と周辺物体との距離の把握が容易になり安全な操縦が期待できる。今まで不可能とされてた第三者視点変換を,ARを用いて現実世界に実現する。
研究業績(抜粋)
- Ryota Kimura, Nobutomo Matsunaga, Hiroshi Okajima,Driving Assistance of Welfare Vehicle with Virtual Platoon Control Method which has Collision Avoidance Function using Mixed Reality,IEEE International Conference on Systems,Man,and Cybernetics,2018 (to beappeared)
- Ryota Kimura, Nobutomo Matsunaga, Hiroshi Okajima and Gou Kotaki,Design of Virtual Platoon Control System using Augmented Reality to Assist Welfare Vehicle Users, 17th International Conference on Control, Automation and Systems (ICCAS 2017), 2017, Jeju, Korea, 2017 (ICCAS Outstanding Paper Award受賞)
- Ryota Kimura, Nobutomo Matsunaga, Hiroshi Okajima and Gou Koutaki, Driving Assistance System forWelfare Vehicle using Virtual Platoon Control with Augmented Reality, International of SICE, 2017
- 木村亮太,松永信智,岡島寛,拡張現実を用いた福祉車両の操縦支援システム,ロボメック2017
注視点依存型車両操舵モデルに関する研究 :NEW!
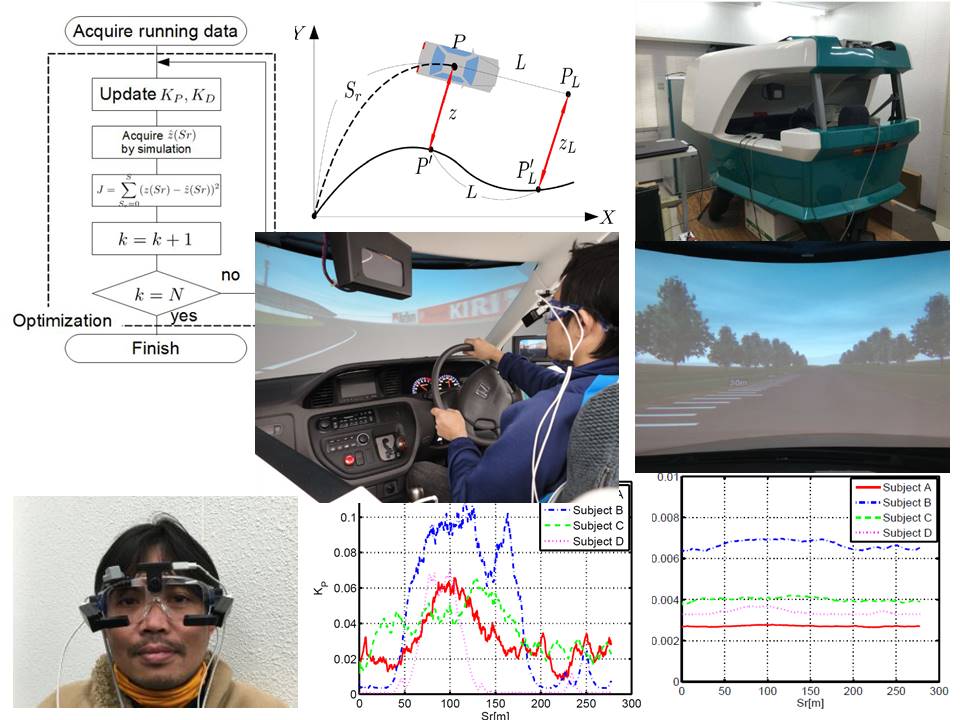
近年,精力的に自動車の自動運転が研究されておりその実用化は間近である。自動運転の重要要素となるのがドライバの操作を数式で記述した操舵モデルであ る。よく使用されるモデルは操舵をPID動作で記述したもので,ドライバの状態や環境によりこれらを切り替えて自動運転が行われる。一般的な操舵モデルは システムの分析には用いられるものの,精密なモデルを得ようとする研究は行われてこなかった。 本研究室では,ドライバの視線情報を実時間で検出し操舵に利用することで,ドライバの状態を表現できる新たなスキームの研究を行っている。この視線情報 を使ったモデル(注視点依存型モデル)は,毎時刻の注視点の変化に従いパラメータが変化する非線形モデルで記述性が高い。また,オンラインでモデルを獲得 する ことができれば,ドライバの状態を逐次評価することもでき,過労や漫然運転防止効果も期待できる。現在,走行中の画像から車両の走行軌道を計測し,運転中 の注視点を使って状態依存型操舵モデルを推定する手法を開発中である。
研究業績(抜粋)
- Shoichi Sakamoto,Nobutomo Matsunaga and Hiroshi Okajima,Hybrid Steering Model Estimated by Particle Swarm Optimization Based on Driver's Eye Tracking Information,18th International Conference on Control,Automation and Systems (ICCAS 2018)(to beappeared)
- Youki Shida, Hiroshi Okajima, Daisuke Matuno, Nobutomo Matsunaga, Evaluation of Steering Model with Real-time Measurement of Gazing Distance by using Driving Simulator, Proc. of ICCAS2016, pp.39-44, 2016 (ICCAS Outstanding Paper Award受賞)
- 志田裕紀,岡島寛,松永信智, ドライビングシミュレータを用いた注視点依存型操舵モデルの推定,第34回計測自動制御学会九州支部学術講演会,101B2, pp.39-42, 2015
- 志田裕紀,岡島寛,松永信智,注視点距離の変化を考慮したドライバの操舵モデル,第59回システム制御情報学会研究発表講演会,2015
次世代福祉車両STAViの走行制御に関する研究 :NEW!

近年,乗車が容易な前乗型の電動車椅子STAViが共同研究先の(株)サンワハイテックより発売された。この前乗り型車椅子はベッドなどから乗車を考慮して前乗り方式となっており,福祉機器として様々な利点がある。
前乗り式の車椅子の特徴は,前輪が駆動輪,後輪が自由キャスタであり,従来の電動車椅子に比べ高度な操作支援が要求される。そこで本研究では,より安全
な電動車椅子を実現するために,動的モデルを用いた姿勢制御の方法,隊列誘導方法,オフォロート走行が可能なSkid Steer
Vehicle(SSV)について操縦支援制御方の検討する。また,路面検出など走行環境の検出や画像情報に基づく制御手法の研究を行っている。
研究業績(抜粋)
- Shoichi Sakamoto, Tanaka Tomoki, Hiroshi Okajima and Nobutomo Matsunaga, Evaluation of Skid Steer Welfare Vehicle for Robust Assistance Control with Model Error Compensator, 17th International Conference on Control, Automation and Systems (ICCAS 2017), Jeju, Korea, 2017(ICCAS Best Presentation Award finalist)
- 菅野達也,壇裕介,岡島寛,松永信智,モデル誤差抑制補償器による福祉用パーソナルビークルのロバストな屋内隊列走行システムの走行評価 日本機械学会論文集 DOI:10.1299/transjsme.15-00690,2016
- 宮本洋孝,田中友樹,岡島寛,松永信智,PID制御を用いたモデル誤差抑制補償器によるスキッドステア型車両の操縦支援制御 電気学会論文誌,C,Vol.136,No.5,pp.642-649,2016
- Hirotaka Miyamoto,Tomoki Tanaka, Hiroshi Okajima and Nobutomo Matsunaga, Experiment of Robust Driving Assistance Control for Skid Steer Welfare Vehicle using Model Error Compensator, 16th International Conference on Control, Automation and Systems(ICCAS 2016)Oct. 16-19, 2016 in HICO, Gyeongju(ICCAS Outstanding Paper Award受賞)
- Tatsuya Sugano, Hiroshi Okajima, Satoshi Samura and Nobutomo Matsunaga, Narrow Space Driving of Welfare Vehicles using Robust Platoon Control with Adaptive Way Point Tracking, SICE Annual Conference 2016 Tsukuba, Japan, September 20-23, pp.1436-1441, 2016
- Tatsuya Sugano, Hiroshi Okajima, Nobutomo Matsunaga, Robust and Precise Platoon Driving Control of Welfare Vehicles along Wheel Track by using Model Error Compensator, the 41st Annual Conference of the IEEE Industrial Electronics Society (IECON), pp.256-261, 2015
- 岡島寛,松永信智,前輪駆動型電動車椅子に対する規範モデルに基づいた操縦性能改善,設計工学,第50巻,4号,pp.163-168,2015
- Takahiro Miyamoto, Kazuki Nabekura, Hiroshi Okajima, Nobutomo Matsunaga, Steering Control of Piggyback Type Wheelchair using Avoidance intension Detected by Weight Shift International Conference on Advanced Mechatronic Systems, Kumamoto, pp.330-335, 2014
- Tatsuya Sugano, Yusuke Dan, Hiroshi Okajima, Nobutomo Matsunaga, Zhencheng Hu, Platoon Driving Experiment of Electric Wheelchair in Narrow Space by using Model Error Compensator, International Conference on Advanced Mechatronic System, Kumamoto, pp.324-329, 2014
- Yusuke Dan, Tatsuya Sugano, Hiroshi Okajima,Nobutomo Matsunaga, Zhencheng Hu, Indoor Platoon Driving of Electric Whellchair with Model Error Compensator along Wheel Track of Preceding Vehicle International Symposium on Advanced Control of Industrial Processes (ADCONIP) 2014, pp.219-224,2014
- Aydin Tarik Zengin, Yutaro Maruno,Hiroshi Okajima, Nobutomo Matunaga, Direct Yaw Moment Control of Front Drive Type Electric Wheelchair with Free-casters,Journal of Control, Measurement, and System Integration 6(6), 2013
- Yutaro Maruno,Yusuke Dan, Aydin Tarik Zengin, Hiroshi Okajima, Nobutomo Matsunaga, Maneuverability Analysis of Front Drive Type Personal Vehicle STAVi using Modeling Error Compensation System, 7th IFAC Symposium on Advanced in Automative Control, 2013_9
- Aydin Tarik Zengin, Yutaro Maruno, Hiroshi Okajima, Nobutomo Matunaga,Improvement in Straight-ahead Stability of Front Drive Type Electric Wheelchair using Yaw-rate Control,The 2012 International Conference on Advanced Vehicle Technologies and Integration (VTI 2012) 2012
- Yutaro Maruno,,Aydin Tarik Zengin, ,Hiroshi Okajima, Nobutomo Matunaga, Driving Experiment of Front Drive Type Electric Wheelchair using Yaw-rate Control, The SICE Annual Conference 2012,WeA11-01 pp.1408--1413 2012
- Aydin Tarik Zengin, Yutaro Maruno, Hiroshi Okajima, Nobutomo Matunaga, Slope Driving Experiment of Front Drive Type Electric Wheelchair with Casters using Yaw-rate Compensation, Proc. of ICCAS International Conference 2012 pp.2008-2013, 2012
- 丸野,岡島,松永,中村:平坦路走行モデルを規範とする前輪駆動型電動車椅子の姿勢制御,2011年電気学会計測制御研究会, IIC-11-004,2011
- Y. Maruno,H.Okajima,A. Tarik Z. and N.Matunaga, Direct Yaw Moment Control of Front Drive Type Electric Wheelchair with Free-casters,Proc. of ICCAS International Conference 2011,Seoul,2011 (ICCAS Outstanding Paper Award受賞)
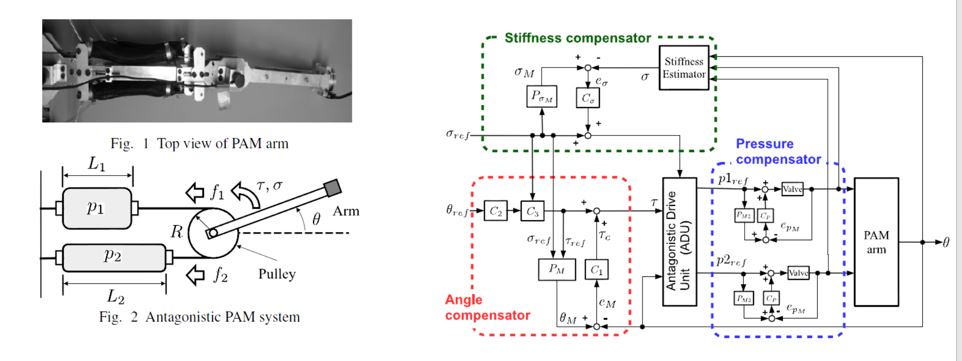
痛みのモデリングとソフトロボティクス
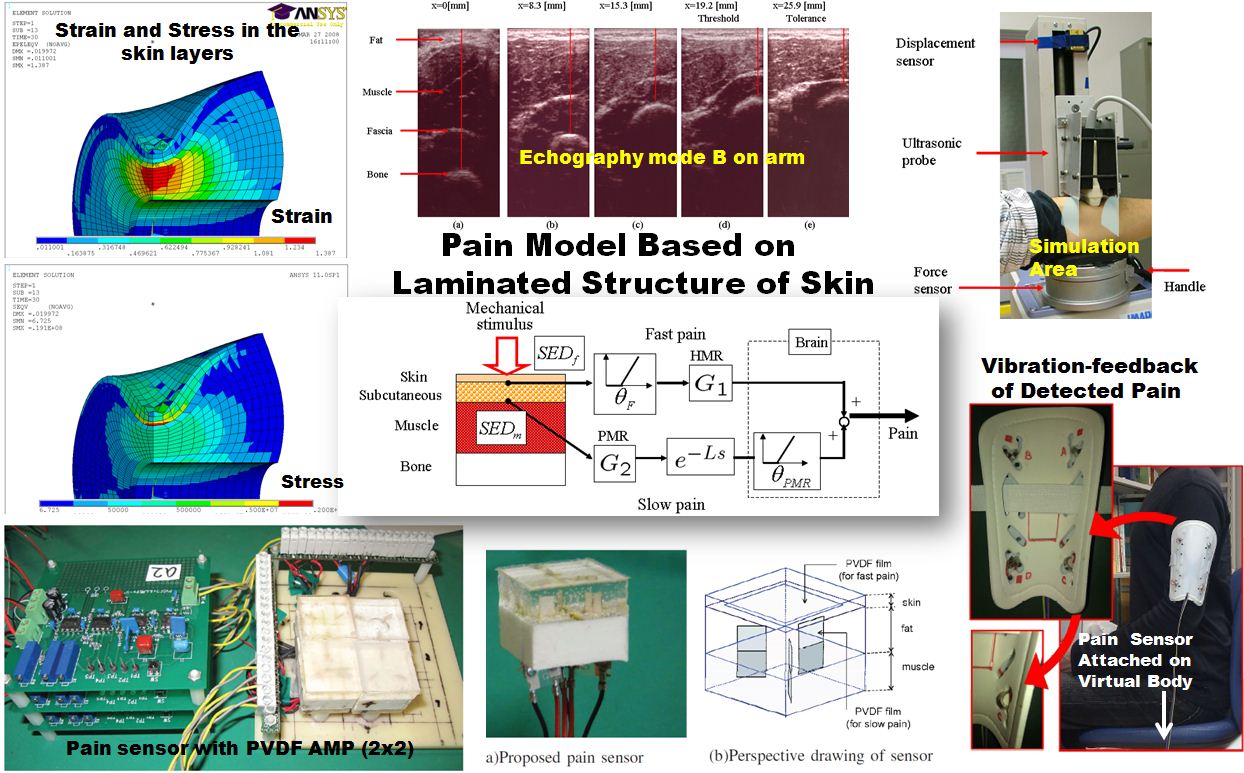
人間とロボットの共存においては、ロボットと人間の物理的な干渉において生ずる主観的な感覚を考慮する必要がある。筆者らは,主観的な痛みを機械に理解させる試みと、機械そのものを安全にするソフトロボティクスに関する研究を行っている。
痛みの研究は、機械に人間の痛みを模擬した機構を実装することにより、機械の擬人化を行い安全・安心な機械系を実現することにある。そこで、痛みの中で
も人間とロボットの衝突や接触により発生する表面痛に対して2質点系でモデル化を行う。得られたモデルを用い、ゲートコントロール説に基づいて痛みと触信
号のチャンネル制御機能をニューラルネットを用いて構成する。また,ソフトロボティクスはマッキンベン型の人工筋を用いた制御系の研究を行っている。
研究業績(抜粋)
- Yuto YAMAMOTO, Nobutomo MATSUNAGA and Hiroshi OKAJIMARobust Variable Stiffness Control of McKibben Type Pneumatic Artificial Muscle Arm by using Multiple Model Error Compensator,17th International Conference on Control, Automation and Systems (ICCAS 2017), 2017, Jeju, Korea, 2017 (ICCAS Outstanding Paper Award受賞)
- Aydin Tarik Zengin,Hiroshi Okajima, Nobutomo Matsunaga,On driving assistance using forearm vibrotactive feedback for wheelchair drivers Proc of 18 symposium on Artificial life and robotics,pp.379-382 2013 5
- 松永,川路:表面痛のモデリングとロボット回避運動への応用,計測自動制御学会論文誌,Vol.43,No.7,pp.599-605,2007
- 松永,赤山,川路:皮膚の積層構造に基づく機械刺激による二次痛の発生モデル,電気学会論文誌,Vol. 129-C,No.2,pp.320-327,2009
- N.Matsuaga,Aydin T. Z.,Okajima and S. Kawaji : Emulation of Fast and Slow Pain using Multi-layered Sensor modeled on the Layered Structure of Human Skin,Journal of Robotics Vol.23,No.1,pp.173-179,2011
- Aydin T.Z.,H. Okajima,N. MATSUNAGA,On Vibration Feedback Method for Pain Emuration and its Feedback to Human,Proc. of ICCAS International Conference 2011,Seoul,2011
肘関節の拘縮を予防する2自由度CPMデバイスの開発
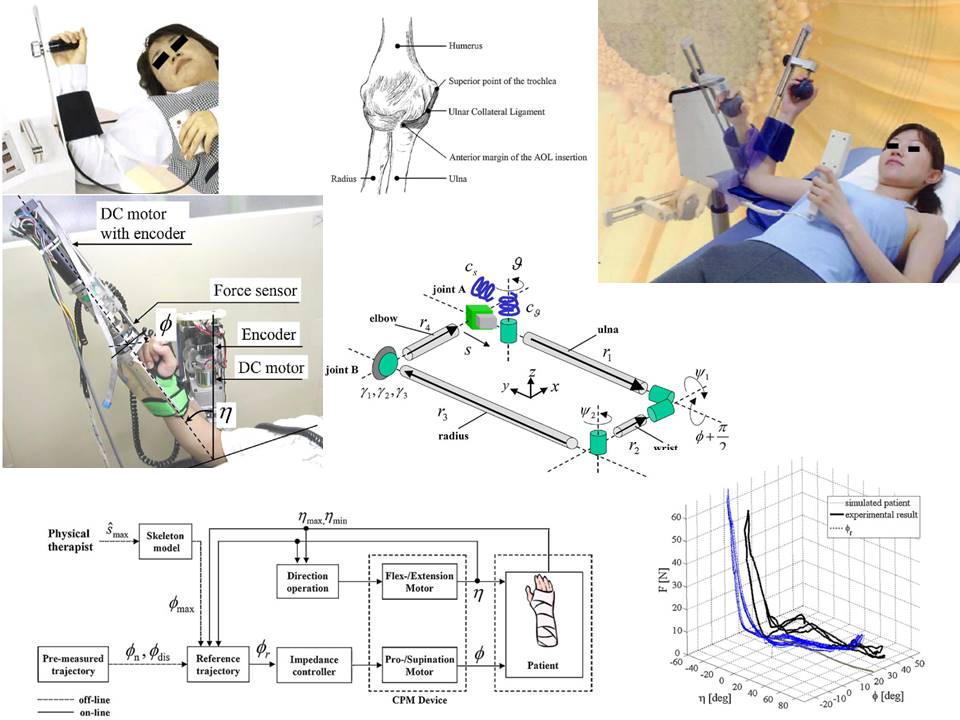
肘関節の伸展・屈曲動作の際に,前腕では関節の構的な特徴である回内・回外動作が行われることから,リハビリ訓練においては回内・回外動作を拘束した自
由度の伸展・屈曲の動作ではなく,回内・回外動作を能動的に制御する動作が有効となる。より効果的な上肢用動作を実現するためには,上肢のバイオメカニク
スの特徴に着目した装置の構成および制御法が求められる。
本論文では,肘関節の伸展・屈曲及び前腕の回内・回外動
作を同時に実現する機構を有する装置を製作し,健
常者の前腕の回内角軌道を規範とするインピーダンス制御
法を提案する。さらに,本手法を用いて模擬疾患者に対す
るリハビリ訓練実験を行い,有効性を検討する。
なお,本研究は熊本大学名誉教授川路茂保先生との共同研究である。
研究業績(抜粋)
- Nobutomo Matsunaga, Shota Miyaguchi, Hiroshi Okajima, and Shigeyasu Kawaji,Impedance Control of Two d.o.f. CPM Device for Elbow Joint,Journal of Robotics and Mechatronics,Vol.26, No.4, 2014
- S.Miyaguchi et al., “Trajectory Generation of CPM Device for Upper Limbs Considering Constraint Caused by Joint Disorder”,J. of Robotics and Mechatronics, Vol.22, No.2, pp. 239-246, 2010
- S.Miyaguchi et al., “Impedance Control of Two d.o.f. CPM Device for Elbow Joint,” Mechatronic Systems, Applications, A. Miella et al. (Eds.), In tech, pp. 213-226, 2010.
- S. Miyaguchi et al., “Control Scheme of Two d.o.f. CPM Device to Suppress the Extension of Ligament of the Elbow,” Biomedical Signal Processing and Control, doi:10.1016/j.bspc.2009.02.007, 2009.
- N. Matsunaga, S. Miyaguchi, K. Nojiri, S. Kawaji, Impedance control of CPM device with flex-/extension and pro-/supination for upper limbs, Transactions of the Japan Society of Mechanical Engineers. C 73 (9), pp.2583-2590, 2007.
- S. Miyaguchi, N. Matsunaga, K. Nojiri, S. Kawaji, Impedance control of pro-/supination based on the skeleton model of upper limbs, in: Int. Conf. on Control, Automation and Systems, pp.968-973, 2007 ほか
非干渉化制御(熱プロセス)
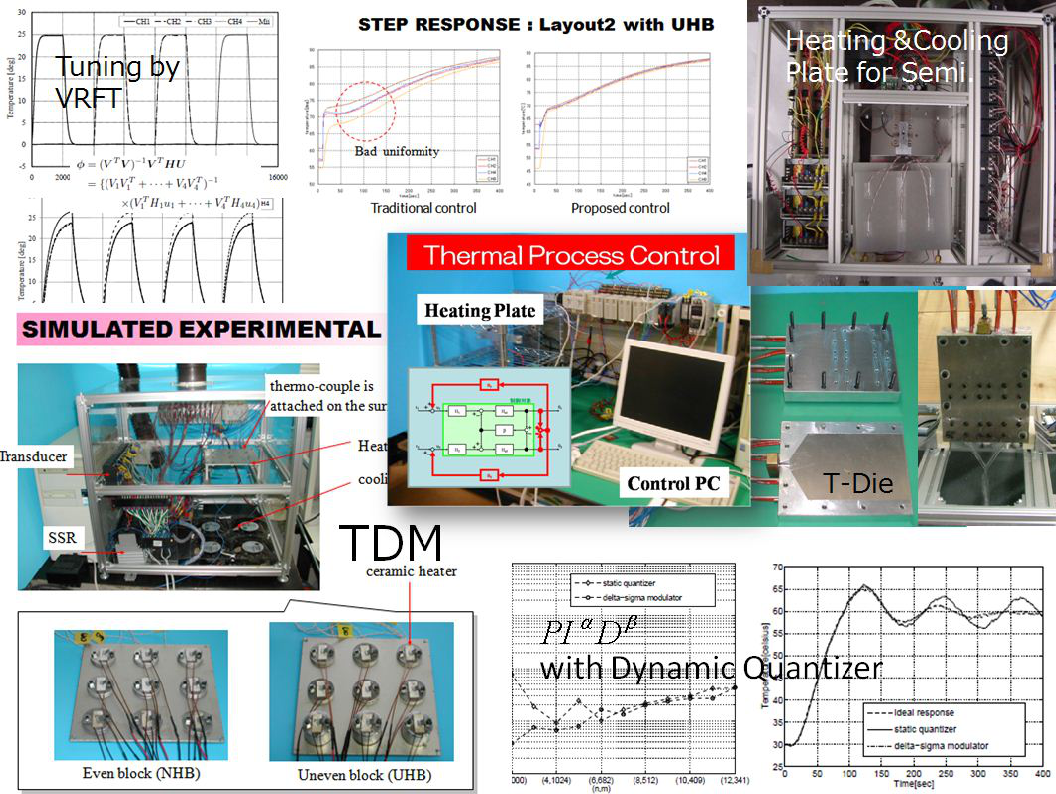
近年,包装機や成形機・半導体などの熱処理プロセスにおいて,熱処理の高品質化が強く要請されており,個々の点における温度制御のみならず面における温
度の均一化が重要課題となっている。特に過渡状態における熱処理の不均一性は,製品の品質に大きく影響する。この問題の根源的克服は分布系において熱干渉
にいかに対処するかにある。筆者らは,複数点間の温度傾斜を直接的に制御することで,各点の温度干渉を低減化する「傾斜温度制御法」を提案し、様々な産業
機器への応用を行っている。なお,本研究は熊本大学名誉教授川路茂保先生との共同研究である。
研究業績(抜粋)
- 一政豪,岡島寛,松永信智:非最小位相系に対するモデル誤差抑制補償器の設計,計測自動制御学会論文誌,Vol. 51,No. 11,pp.794-801, 2011
- 松永信智,仲野征彦,岡島寛,川路茂保:VRFTを用いた二次元熱板に対するフィードバック型非干渉化制御器の調整;電気学会論文集D部門,Vol. 130,No. 10,2010
- 松永信智,南野郁夫,川路茂保,熱系のフィードバック構造型モデルに基づく均一温度制御系の設計,電気学会論文誌C,Vol.127-C, No.12 pp.2126-2132 2007
- 松永信智、南野郁夫、川路茂保,熱系のフィードバック型モデルと非干渉制御への応用,電気学会論文誌C,Vol.127-C, No.3, pp.373-379 2007
- 松永,仲野,岡島,川路:VRFTを用いた二次元熱板に対するフィードバック型非干渉化制御器の調整,電気学会論文誌D編,Vol.130,No.10,pp.1175-1181,2010
- 一政豪,岡島寛,松永信智;非最小位相系に対するモデル誤差抑制補償器の設計,計測自動制御学会論文誌,Vol.51,No.11 pp.794-801,2015
- 佐々野浩二,岡島寛,松永信智:非整数次PID制御系のメモリ制約下での実装手法の検討と熱板温度制御系による実機検証;システム制御情報学会論文誌,Vol. 23,No. 11,pp.257-264,2010
次世代自動車の制御実験
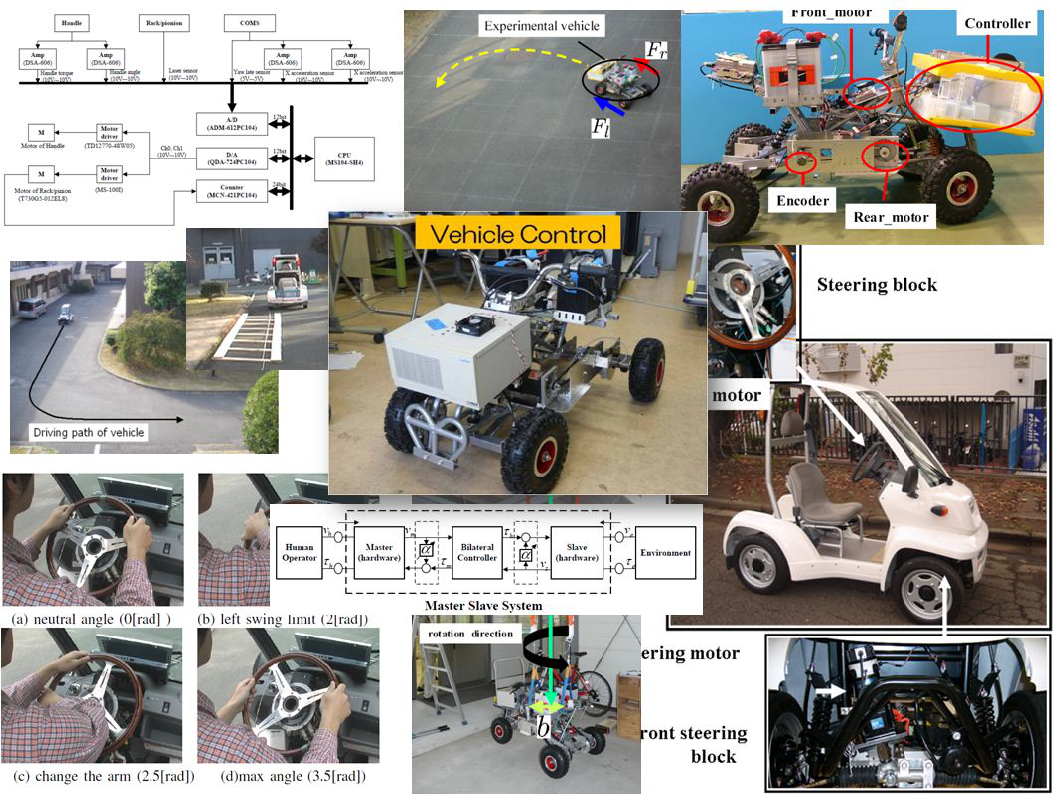
電気自動車などの発達により,近年,冗長自由度を有する車両が多く開発されている。当研究室では,直接ヨーモーメント制御(DYC)や
Passivity
Approachを使った安全性の高いステア・バイ・ワイヤー(SBW)の設計理論の構築およびトヨタ車体のCOMSや1/4モデルを使った実験システム
を作り検証している。なお,本研究は熊本大学名誉教授川路茂保先生との共同研究である。
研究業績(抜粋)
- 任,松永,川路:受動性に基づくバイラテラル制御を用いた電気自動車のステアバイワイヤ制御,日本機械学会論文集,074巻748号C編,pp.92-99,2008
- 岡島,松永,川路:ニュートラルステア特性実現のための直接ヨーモーメント制御,計測自動制御学会論文集,Vol.45, No.3,pp. 153-159,2009
- N. Matsunaga, Im J., S. Kawaji:Control of Steer-by-Wire Vehicles using Bilateral Control Designed by Passivity Approach,Journal of System Design and Dynamics, Vol.4 No.1,pp.50-60,2010
